| Welcome | Zaurus | Projects | Papers | Contact |
| CyTV - Network streaming for elgato EyeTV | ||
| OpenGL Grabber (Ogre) | ||
| Lego Mindstorms | ||
| Virtual Solar System | ||
| Tetris | ||
| BWT |
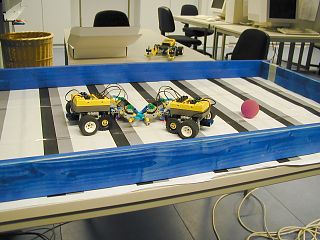
On this page you can find some tools for Lego Mindstorms which are part of my Master Thesis. Their purpose is to make Mindstorms robots play soccer, but they can also be helpful in completely different projects. To uncompress the files in the download section, you can (for example) use WinZip.
The source code for the soccer robots contains, among others, the following functions:
The Vision Command software is able to detect different colors, but it fails to recognize small colored objects within large areas of the camera picture. To improve recognition in this case, I wrote a filter driver that can find and enlarge small objects before the camera image reaches the Vision Command software. The source code is also available. Note: The first version available here contained a bug regarding the tolerance setting. This is fixed in the current version.
Installing the filter is simple: First copy the file "camfilt.sys" into the folder "C:\Windows\System32\Drivers" (or similar, depending on your windows installation). "camtool.exe" can reside in an arbitrary folder. Then, to start using the filter, call
and restart Windows. To switch off the filter, call
(also requires a Windows restart). Please note that you may only be able do delete the file "camfilt.sys" after switching off the filter. The filter can be configured at runtime. The parameters are explained in detail in my Master Thesis, so here's just an example how to detect a red object and enlarge it for Vision Command:
You can test the filter settings by calling " The filter has been tested under Windows 98, but using ME shouldn't make a difference. According to Microsoft's documentation, Windows 2000 should be working too (though I rather doubt that).
Vision Command (VC) can only talk to one RCX brick at a time. If there are several bricks within the range of the IR tower, VC stops the current program and shows an error message. The reason is that confirmation messages from the robots interfere with each other and arrive garbled at the IR tower. However, it would often be useful to broadcast to several robots at once, e.g. to send the position of the ball in a soccer game. This problem can be solved with a new "VPBrick.dll" that fools Vision Command into thinking that sending messages is always successful. This way, the VC program is not interrupted when several robots (or none at all) are within range of the IR tower. To install the "broadcast patch", you have to rename the file "VPBrick.dll" in the Vision Command folder to "VPBrick_orig.dll". It has to be exactly this name, since the new version needs the original to function and looks for it under this name! Afterwards, you can copy the downloaded "VPBrick.dll" into the Vision Command folder. Attention: DO NOT overwrite the original DLL, or you'll have to reinstall the Vision Command software! Please condsider that Vision Command wants to download a small RCX program to slot 5 of the robot when you start a VC program. If none or more than one robot is in range at that time, this fails (even with the new "VPBrick.dll"). For this reason, you must adhere to the following sequence when using the broadcast feature:
Last update: 10/24/2001 |